Wait…You’re Calling
it GOAT?
The Greenhouse, Ozone, and Atmospheric Trace gas (GOAT) project
is an atmospheric experiment built on a high altitude balloon platform. It is one of 12 payloads that will be
integrated onto a larger gondola that will float at approximately 37,000 meters
above ground over the state of New Mexico for approximately 15 to 30 hours. The primary mission of GOAT is to add to the
continuous study of SO2 levels in the upper atmosphere and to test the
collections methods to aid in similar future high altitude balloon atmospheric studies. Simultaneously the payload will measure the
concentrations of NO2 and Ozone for real time calibration during the flight and
to add to the understanding of how the three gasses interact. Though the build
poses many challenges to the team, the project parallels the team’s previous
HAB experience and continued interest in engineering and atmospheric experimentation.

What’s the Point?
Studying the concentrations of SO2, NO2 and O3 in the upper
atmosphere is important for learning more about atmospheric composition, how
they interact and their effects on biological life. Sulfur dioxide is a toxic, reactive gas that
is emitted both naturally and from human activities such as the consumption of
fossil fuels. The gas tends to react
with moisture in the atmosphere, creating sulfurous acid and sulfuric acid
aerosols which contribute to acid rain.
Acid rain affects the acidity levels of soils, water supplies, organisms
and their ecosystems. Ozone is also a
highly reactive gas which is important in the absorption of ultraviolet
radiation. Due to its reactivity, there
is a relationship between ozone concentration levels and the amount of NO2 present. Nitrous dioxide is also a large contributor
to acid rain and the depletion of ozone in the atmosphere making it an
important trace gas to study. Much of
the NO2 concentrations is also due to human activities. Understanding the interactions of the three
gasses will show us more about how our atmosphere works and how that
interaction affects our lives.

I’m not Dramatic, I’m
Just Sensitive
The GOAT project will measure these gasses with Arduino
calibrated electrochemical SPEC sensors as well as passive Ogawa samplers. The team will compare the collected data from
the sensors to the data reported by the EPA in the geographical region. The goal is to use the data to understand
composition of the upper atmosphere and to test the accuracy of using
inexpensive, consumer quality terrestrial based sensors for high altitude data
collection. The expectation is that the
data the sensors collect will fall within the same levels reported by the EPA.
The chosen SPEC sensors will be paired with diode temperature
sensors and are sensitive enough to collect data at the expected concentration
levels. They will be controlled by an
Arduino microcontroller paired with a microprocessor that will interpret and
log the data from each SPEC and temperature sensor, taking readings every 15 to
30 seconds. The sensors operate in a
variety of atmospheric pressure, humidity and temperature levels. The most
restricting parameter for the sensors is their operating temperature range. Our most challenging engineering task will be
to keep the sensors at a temperature range of -25 to 50 degrees Celsius which
allows a buffer against the sensors operating extremes and ensures more accurate
readings during the flight.
Before flight, the sensors will be given a known amount of chemicals
to establish a baseline for measurement.
The sensor array will also be tested in a cryo-vacuum chamber after
assembly in order to test their functionality in an atmosphere that mimics the
possible extremes the payload may encounter.
Air flow will be directed across the sensors using fans or possibly
blowers which will be decided on during testing. The sensor housing and hull
will be insulated as well to help minimize the effects of extreme cold or hot
conditions. In order to calibrate the
sensors for fight, they will be mounted along with the Arduino microprocessor several
hours pre-flight, which will use the manufacture data to reconcile the readings
the sensors take to the ambient temperature.
The team will be able to log the sensor readings against time,
temperature, atmospheric pressure, and altitude.
Under the recommendation of Dr J.J. Bang from the NCCU
atmospheric lab, the payload will also carry Ogawa passive sensors to test
their usefulness in collecting samples in high altitude conditions. The samplers use a coated pad to measure
concentrations of SO2, NO2, and O3 from ambient air without the
requirement of a power source and can be mounted inside the sensor housing
which will have access to ample air flow.
The sampler is designed to be exposed to different weather conditions,
keeping out debris. They are unaffected
by the extreme temperatures the payload will encounter and will be well
protected inside the housing. The sensor
pads can be affected by moisture so silica gel packs will be installed to
mitigate that risk.
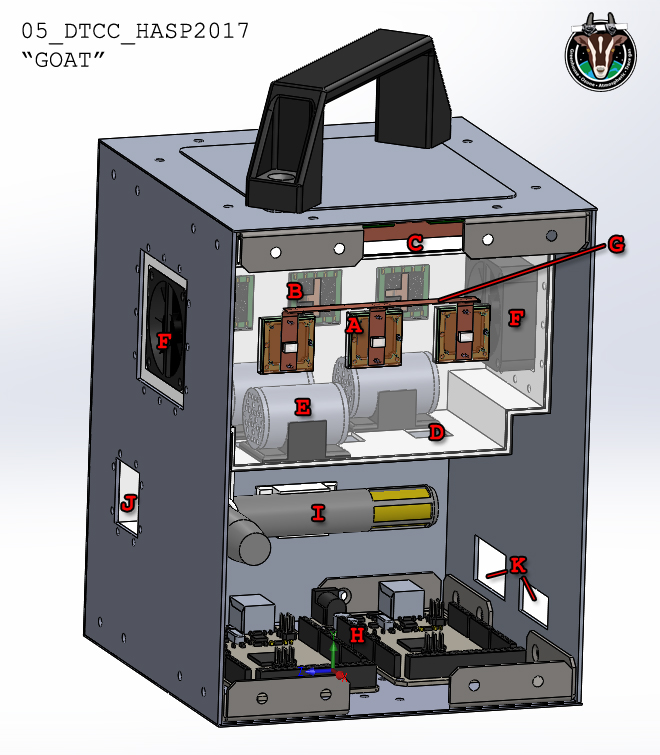
The GOAT payload will fly three sensors of each type for
redundancy. The electrolyte sensors will be separated into three banks that
will consist of one type of each sensor.
The three banks will be mounted from the outside of a rectangular shaped
tunnel with one sensor from each bank occupying one wall. The side of the sensor that needs access to
air flow will be on the inside of the tunnel.
The tunnel itself will run from the fore to the aft plate as shown in
the CAD model and mounted to air flow ports on either end. An electric fan will be mounted on both port
ends facing in the same direction to push atmosphere through the tunnel and
over the sensor array. The sensors are
designed to work in static conditions at ground level. The fans will help move atmosphere over the
sensors in the thin stratosphere.
The sensors will be mounted with bolts on small
non-conductive standoffs. Wiring for the
sensors around the outside of the tunnel and along the inside panel wall. The team will test anti – arcing spray and
layers of anti – arcing silicon to eliminate the high risk of arcing in the
upper atmosphere.
In order to keep the integrity of the measurements each bank
of sensors will take their respective readings simultaneously. The readings will be coupled with the
telemetric data from HASP and stored on redundant SD card devices from the dual
Arduino setup (more on that below).


Ryan Hull, it’s
pronounced “O-G-A-W-A.”
The pads will arrive in a refrigerated storage container.
Before flight the pads will be removed from the container with tweezers and
placed into their respective housing. A
secondary pad will be taken out at the same time and kept isolated as a blank
control. The time and date will be
noted. The pads will be reacting as soon
as they are added to the payload until they can be removed after landing. As soon as the payload is recovered the pads
will be removed from their housing with tweezers and placed into glass vial
purposely used for their storage. Telemetry
and atmospheric readings from the payload will guide analysis in order to have
the most accurate results. Dr. Bang will
be consulted to help with analysis.


Structure Heard
The hull will be made from 6061 aluminum paneling, bolted
together with stainless steel interior corner brackets. Due to their durability steel fasteners have
been chosen. Thermal expansion and
contraction of the aluminum and steel is negligible in reference to fastener
tolerances. Due to the relatively short
time frame the payload will be assembled we can also neglect the steel and
aluminum mismatch. The hull is a
rectangular prism shape with fore, aft, front, back, top and bottom
panels. The fore, aft, top and bottom
panels will be permanently mounted leaving the top, front and back panels
removable for assembly and trouble shooting.
Joints for permanent mounting will be sealed with a silicon caulk cured
in a vacuum chamber. The bottom of the
hull will mount to the provided PVC mounting plate with no modification to the
plate needed save the holes for the through bolts. Fasteners for the bottom plate will be
counter bored and fastened with flush mount bolts to ensure a good fit to the
PVC plate without any major modifications required. Any internal struts or shelves will be made
from aluminum sheet, aluminum angle, or PVC board depending on the requirements
and restrictions. All custom parts will
be 3D printed with ABS plastic or made by our team machinist.


It’s Getting Hot in
Here….
Thermal control for the payload will primarily come from the
15W power supplied by HASP and the sun.
The temperature range will be controlled by the Arduino between -25 and
50 degree Celsius since all materials and sensors in the payload are rated
within that range. Testing will
determine the exact equipment and methods that will be used for thermal control
as the assembly comes together. For
testing the team will use one of their several contacts in order to source a
cryo-vacuum chamber that can be used to mimic the diminished atmosphere and
expected temperature fluctuations as outlined.
The plan is to fly Peltier-effect thermoelectric units for
each SO2, NO2 and O3 sensors to generate or bleed thermal energy to or from the
individual sensor as needed. The exact
amount of heating and cooling that will be required is unknown. And due to the time lapse between the ground
and the payload, control will have to be automated from the Arduino. The coldest portion of the flight will be
when the payload travels through the troposphere. During float, however, the challenge in thermal
regulation will come from needing to cool the payload. The
hull will be painted with a reflective aircraft grade paint and heat generating
components connected to the hull with copper heat straps which use the hull as
a heat sink. Testing is needed to
confirm that these options (or others) do not chemically interfere with the
sensor array.
GOAT will fly two AM2315’s with one capturing external
atmospheric temperature and barometric pressure conditions and the other will
be inside the hull taking measurements of the internal conditions. In addition, there will be two BME280’s
inside the sensor tunnel reading the temperature of the air as it passes over
the sensors. As referenced above each sensor will be fitted with a diode
temperature sensor that will be read individually by the Arduino to tell if
temperature regulation is needed and for which of the individual electrolyte
sensors.


Dual Arduino Action
The Goat will fly two Arduino Megas in a master and slave
configuration. Due to the number of
sensors and sensor management devices, two Arduinos are needed. An oscillator will be used for accurate time
keeping and two SD storage cards will be used for redundant data storage. The master Arduino will control the overall
operations of the payload and delegate tasks to the slave Arduino that it
cannot complete. To complete tasks
efficiently, each Arduino will have individual tasks assigned to them to
complete at set intervals. The master
Arduino will be responsible for the serial uplink and downlink. Plans also allow for real time data to be
sent to the ground and read through a web based interface that will be provided
for HASP. This gives the team
information relatively close to real time and the ability to send commands in
the uplink to the Arduino pair.
Once power is provided to GOAT, the Arduinos will cycle
through their startup processes and the fans will start. After receiving the
first batch of telemetry from HASP the oscillator clock will be configured with
the timestamp GOAT received. At this
point the Arduino programs will run the majority of the payload’s operations. The dual set up is designed to be dynamic
and adaptive to any in-flight situations that may occur and will be able to
receive serial uplink commands from the on ground interface if needed.
The program for the dual set up will be created by the
software team. Program operation will
consist of two stages. The first stage
will be sets of constant priority tasks such as electrolyte sensor temperature
readings and serial uplink commands.
Those priority tasks will inform what will happen in the second
stage. Based on the information from the
first stage, the second stage will be able to do several other operations per
cycle. Options for the second stage
include heating, cooling, serial downlinking, and sensor reading.


Serial Downlinking
and Uplinking (couldn’t think of anything fun)
The serial downlinking will be set to send packets of
information to our web based interface at a rate of approximately 1 stop bit
per 8 bits of information with a maximum packet size of 1200 bits. That is enough to provide memory for the packet’s
timestamp, checksum, data, and recommended terminating bit. This means that our downlink rates may be as
low as one packet of information per second. The data portion of the packet will allow for
up to 4 sensor readings to be transmitted per packet which allows for possible
redundancy in the data sent. The
downlink process will have three modes that have respective corruption risks
associated with each.
The payload will only be using the ‘power on/off” discrete
command as outlined by HASP. There are 256
commands that can be sent up to the Arduinos that range from “request” to
“force” commands that can be used depending on the situation read from the
downlink information.


GOAT Power!
GOAT power will be provided by the HASP gondola at 30V and
.5A. This gives the payload a total of
15W available to power all of the systems.
Voltage regulators will be used to step down the voltage to an amount
that is usable for the payload. The
payload has some systems such as the fans and Arduinos that require continuous
power and other systems such as the SD cards and thermoelectric module that
will use power intermittently. The
Dongles and the oscillator will be powered directly from the Arduinos.
The thermoelectric modules draw amperage well above .5 when
they are all in use. To circumvent this
problem relay switches will be used to selectively control the modules and
regulate voltage flow. The relays will
be controlled by the Arduinos and will allow the modules to either heat or cool
the sensors depending on the voltage flow.
Weight mitigation due to the amount of wiring required for each of the
payload components is being explored by the Electrical Engineering team.


Show Me the Money!
The GOAT project has already received $5,000 from NC
Spacegrant and may be able to secure additional funding from industry partners,
Durham Tech, and the NCCU atmospheric lab.
The team is well rounded and resourceful. Tool and material procurement, shop space,
and machinery can be easily sourced.
Enthusiasm for the project by the team is high and a detailed schedule
for testing and completion of the project has been cast.


2 Cents
The challenges in thermo control, programing, proper
testing, and electrical engineering are formidable for an amateur team of
students, but so were tUR-1 and tUR-2. I
think we can pull this off and do it well.